I help teams launch cutting-edge technologies in robotics and automation.
I'm passionate about impact-driven businesses and finding tech solutions to grand global challenges.
My core experience is in leading highly cross-functional teams across hardware and software, while driving product vision and strategy.
I received my PhD in Biomechanical Engineering from UC Berkeley (2013), and my BS in Mechanical Engineering from University of Toronto (2007).
Leading technology developments at Urban Machine to build a sustainable system for waste wood recycling
Built team of hardware and software engineers from the ground up to tackle complex automation challenges that span disciplines of perception, manipulation, modular system design and rapid prototyping
Developed and proved core technology across 3 prototype systems within the first year of operations
Helped 6+ startups navigate early technical and product validation via
lean startup methodologies and rapid concept prototyping
Automated greenhouse operations for customer: led development of
an autonomous mobile robot platform for data collection in
greenhouses, including product requirement definition, use cases,
HW/SW design, as well as prototype demonstrations
Addressed labor shortages for soy farmers: created product
requirements and business model for soy weeding robot, prototyped
early HW validation experiments, informed by customer interviews
and field visits
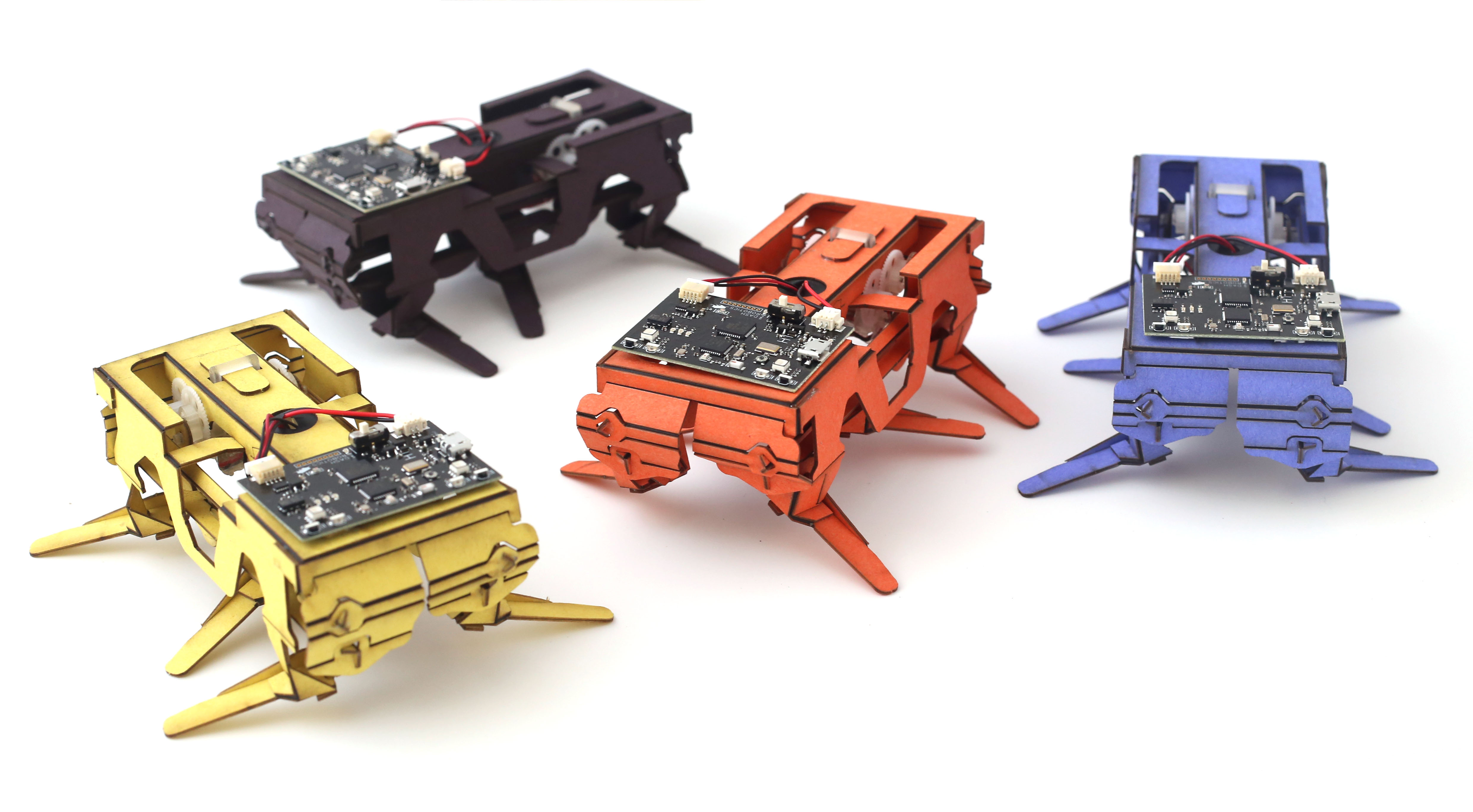
Started and led the company alongside my co-founder, Nick Kohut
Led company-wide product strategy including customer development,
engineering R&D, concept prototyping and manufacturing to launch
Built a highly cross-functional team to 10 employees specializing in
mechatronics, robotics, app development & product design
Launched 6 robotic consumer devices to mass retail with a data driven
product strategy based on user-centered design
Signed several national distribution deals in partnership with major toy
companies such as Mattel, achieving nation-wide distribution
Shipped 100k+ units, achieving 4.6 rating on Amazon and several
national toy awards
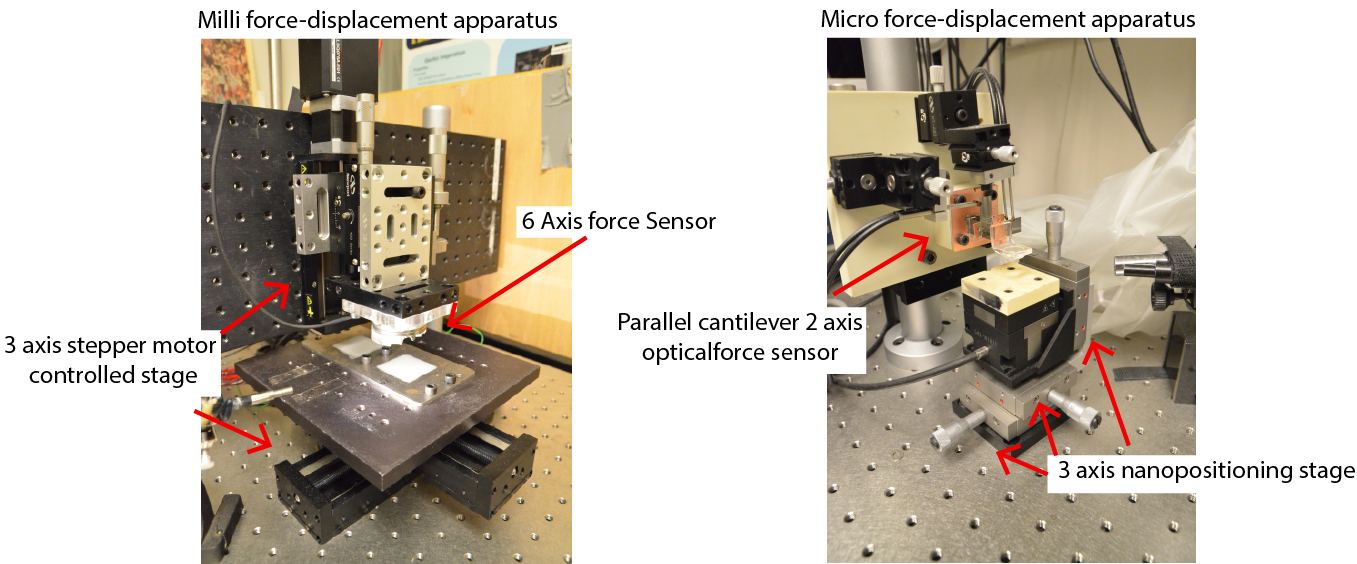
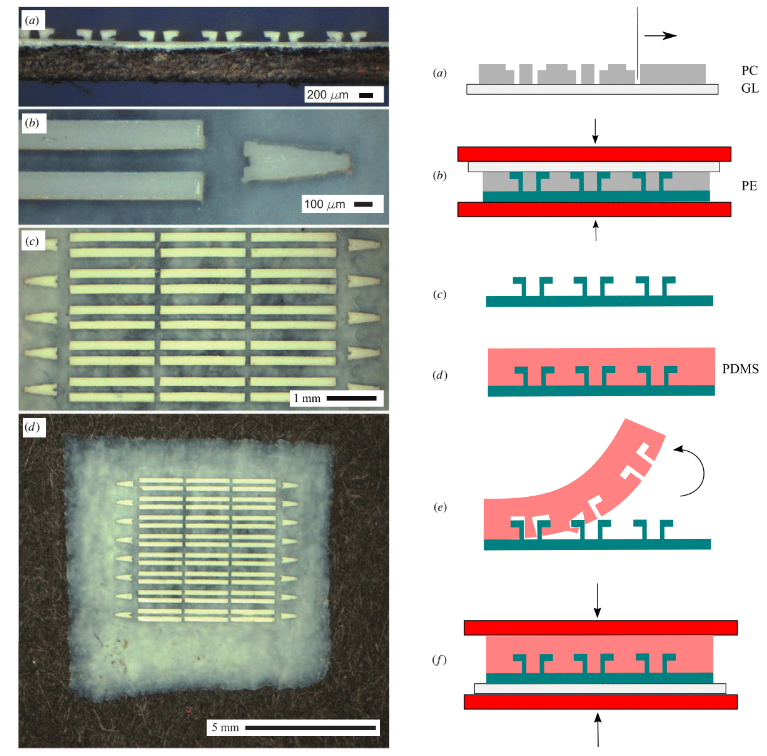
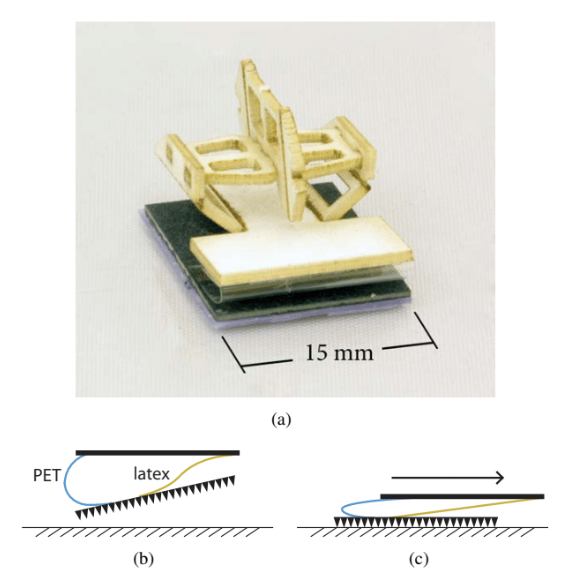
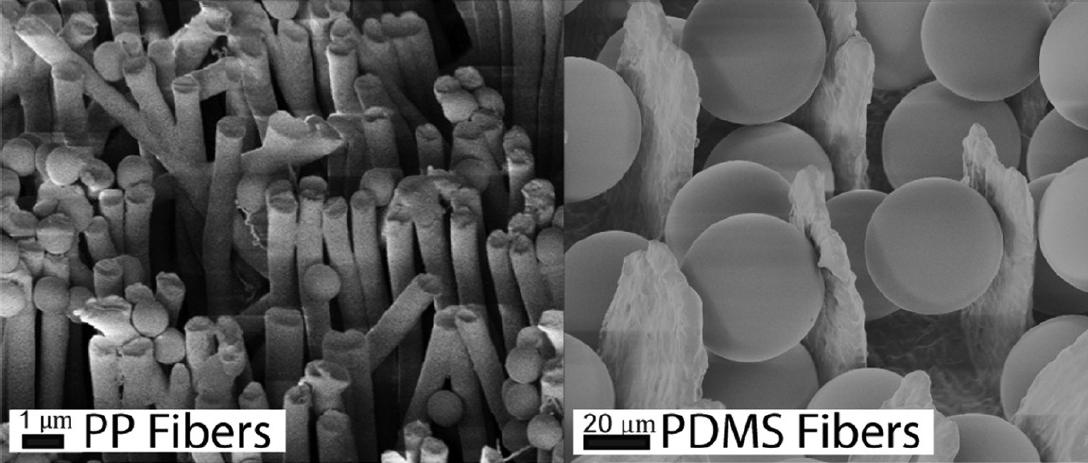
Created micro/nano fabrication techniques for novel bio-inspired
materials based on gecko adhesion
Created robotic 'footbot', an automated high-precision testing
platform, opening new avenues of investigation and collaboration
Designed several applications including solar panel cleaning and
mobile climbing robots, resulting in 2 patent applications
Published 9 journal articles and 5 conference papers in prestigious
journals such as Nature, Journal of The Royal Society Interface, IROS
and Journal of Experimental Biology